無人駕駛汽車制動原理實驗臺
作者:恒信小編 來源: 時間:2018-08-13 17:56:21 閱讀次數:
關鍵字:無人駕駛汽車制動原理實驗臺
")
濟南恒信教具有限公司定制無人駕駛汽車制動原理實驗臺,該無人駕駛汽車教學設備主要是由無人駕駛汽車制動原理系統組成,該汽車教學設備適用于各類院校教學。
無人駕駛汽車制動原理實驗臺介紹
無人駕駛汽車制動原理實驗臺它不僅是一臺智能駕駛公交車那么簡單,它更像是一個完整的“生態系統”,具備客流分析、智能調度、智能維護、無線充電、安全評估等多種功能設置,在安全性、便捷性、高效性等方面擁有極高的科技含量。
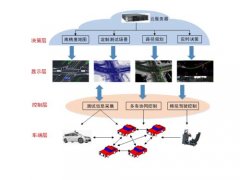
無人駕駛汽車制動原理實驗臺配有激光雷達、毫米波雷達、攝像頭、GPS天線等設備感知周圍環境,并且可以實時對其他道路的使用者以及突發狀況做出反應,并且實現自動駕駛下車輛檢測、障礙物繞行、緊急停車、減速避讓、變道、自動按站停靠等功能,系統安全性、穩定性已完全符合公交試運行的要求。
無人駕駛主要原理在于通過車載傳感系統感知道路環境,自動規劃行車路線并控制車輛到達預定目標;同時通過車載傳感器感知周圍環境,并根據感知所獲得的道路、車輛位置和障礙物信息,控制車輛的轉向和速度,從而使車輛能夠安全、可靠地在道路上行駛。
無人駕駛汽車制動原理實驗臺無人駕駛汽車技術發展模式
1.沃爾沃
沃爾沃提出到 2020 年確保其汽車產品不會出現重大傷亡事故,而發展自動駕駛技術正是這一目標的產物。目前,沃爾沃的車輛已包含有自動緊急剎車、行人和騎車者監測、車道偏移輔助和自適應式巡航控制等技術。
目前,沃爾沃已進入“高度自動駕駛”的實質性項目測試和商業化階段,為加快無人駕駛相關技術研發和推廣,2014 年沃爾沃發布了與愛立信打造的 Sensus 智能操作系統,Sensus 智能操作系統基于愛立信的云端服務,提供包括互聯(Connect)、服務(Service)、娛樂(Entertain)、導航(Navi)、控制(Control)在內的車載互聯功能,以實現安全、便捷、智能、高效的車內外互聯體驗,旨在打造基于車聯網、物聯網和大數據的智能城市交通生態系統
2.豐田
豐田宣布 2020 年左右實現可在“汽車專用道路”上使用的自動駕駛技術,為建立無人駕駛所需的高精度地圖,豐田推出了一套“地圖自動繪制系統”,該系統可以充分利用搭載于市銷車上的攝像頭及 GPS,自動繪制車輛自動駕駛所必須的高精度地圖,該項技術有望為將來的自動駕駛車輛提供行駛支持,未來還有望擴充應對“一般道路”及“道路障礙物”等方面的功能。
該項技術的基本原理是利用搭載了攝像頭的車輛,在行駛過程中采集路面圖像數據和地理位置數據,并將數據統一反饋到信息中心進行集中處理和調整,進而自動繪制出大范圍高精度的地圖。
該系統采用了由豐田研究所開發的空間信息自動生成技術“COSMIC”(云空間信息生成),可利用車輛收集的圖像數據和 GPS 信號繪制高精度地圖。
該系統通過市銷車及現有基礎設施收集信息,因此在實現信息實時更新的同時,還能有效控制系統成本。
近年來,國內外的研究機構和企業對無人駕駛智能汽車開展了一系列研究。無人駕駛智能車通過傳感器感知周圍環境,經過主控計算機分析、計算得出路徑規劃,然后通過控制轉向及速度實現自主駕駛。
無人駕駛汽車制動原理實驗臺智能車的控制系統分為上層規劃系統與底層控制系統,上層規劃系統主要完成收集信息、分析規劃、發送指令等任務,而底層控制系統則是直接實現對車輛的控制。制動系統作為底層控制系統的一部分,與無人駕駛汽車的安全運行息息相關,因此,設計高穩定性、高可靠性的制動控制系統并對其特性展開研究成為智能汽車研發的重要環節。
隨著無人駕駛智能車底層控制系統中制動系統的研究,首先對于具體方案的選擇上,選擇通過機械機構控制踏板機構實現對車輛制動的控制,依據該思路,設計了一套以無刷直流電機為動力的執行機構。
接著,研發人員圍繞著制動系統與無刷直流電機提出主缸壓力與電機電流雙閉環控制理論,根據控制原理、與電機工作原理閉環系統設計,選擇了性能優良的電機控制器件與系統反饋器件。
然后,設計了以數字處理器為核心、電機為動力輸出的制動控制系統,針對控制系統設計硬件和軟件,讓無人駕駛汽車制動原理實驗臺通過對電機的控制達到對制動主缸壓力控制的目的。
無人駕駛汽車制動原理實驗臺隸屬于汽車教學設備與無人駕駛汽車教學設備系列,配有原廠說明說使用參數等。
文章標題:無人駕駛汽車制動原理實驗臺 地址:http://www.chuane.cn/jxsb-wrjs/234.html